Base Image Credit: Source
Unmanned cars, also called robotic cars, are very complex unmanned vehicles that require several parts and components that all work together to enable the unmanned car to function.
Not all cars are going to have the same combination of parts and components. We will try our best to specify those that don’t within each section of this article.
Here are the 9 main parts & components that make up unmanned cars:
- Structural system
- Body/shell
- Bumpers
- Powertrain
- Steering system
- Communications system
- Braking system
- Automation system
- Payload
We’ve decided to group up some of the parts and components into various systems.
Take note that unmanned cars include remote-controlled (RC)/teleoperated, autonomous/self-driving, and autonomous artificially intelligent unmanned cars.
These types of unmanned vehicles fall under the broad category of unmanned motor vehicles. Unmanned motor vehicles are sub-types of unmanned ground vehicles (UGVs).
- What Is An Unmanned Car Structural System?
- What Is An Unmanned Car Body/Shell?
- What Are Unmanned Car Bumpers?
- What Is An Unmanned Car Powertrain?
- What Is An Unmanned Car Steering System?
- What Is An Unmanned Car Communications System?
- What Is An Unmanned Car Braking System?
- What Is An Unmanned Car Automation System?
- What Are Unmanned Car Payloads?
- Conclusion
What Is An Unmanned Car Structural System?
The chassis and frame are two separate parts of an unmanned car that work together and make up the robot’s structural system.
An unmanned car chassis is a part of the supporting structure of an unmanned car that aids in controlling vibrations and noise throughout the vehicle and supports the frame.
If parts such as the wheels, transmission, engine, and suspension are included in the chassis then it’s called a ‘rolling chassis’.
Check out our full post on what unmanned cars are where we dive further into how they work, their applications, parts/components, advantages/disadvantages, propulsion systems they use and examples:
Related Post: What Are Unmanned Cars? Drone/UGV Automobiles Explained
An unmanned car frame is the primary part of the structural system that holds and supports all the other parts and components attached to it and absorbs the initial shock from a collision.
The frame holds various parts and components such as the engine, fuel tank, and transmission depending on the type of vehicle.
The types include ladder frames/body-on-frames, backbone chassis, platform frames/chassis, tubular/spaceframe chassis, and unibody/unit-body frame/chassis.
What Is An Unmanned Car Body/Shell?
An unmanned car body/shell is the part that either sits on the chassis/frame or is integrated with it that supports various parts and components of the car.
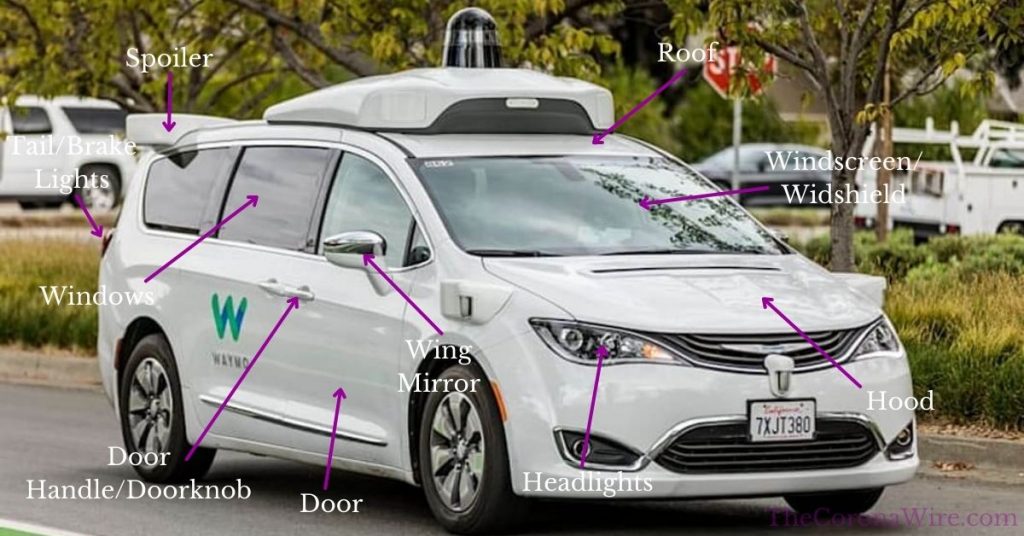
It typically supports the:
- Hood
- Roof (convertibles will have retractable or removable hardtops and soft tops)
- Cargo compartments (tailgate/hatch or trunk lid)
- Doors and handles
- Windows
- Windshields/windscreen and windshield/screen wipers
- Antenna
- Headlight and tail/brake lights with turn signals/indicators
- Wing mirrors+rearview mirrors
- Grille (not in electric vehicles)
- Fuel tank cap (not in electric vehicles)
- Spoiler
There are many different types of car body designs/configurations including but not limited to sedans/saloons, hatchbacks, station wagons and more.
Check out our full post where we dive into all the different types of unmanned cars. For each type, we explain what it is, an advantage and disadvantage, and some examples:
Related Post: Types Of Unmanned Car Drones/UGVs Explained (+Pictures)
Some of these parts, especially on small scale remote-controlled cars, will not function. This means that the trunk, hood, doors, windows and such parts may not open or work as intended.
Furthermore, the interior of the vehicle may not have the compartments that are meant to go along with these parts. Unmanned cars that intend to utilise these parts will of course incorporate them into the build.
Unmanned passenger cars intended to carry people are going to have air conditioning, a horn, radio system, seat belts with actual seats, and other interior electronics for the passenger’s comfort within the body.
What Are Unmanned Car Bumpers?
Unmanned car bumpers are reinforcement bars made of materials such as metal, plastic, or foam that is often covered with a plastic cover and is placed on both the front and rear of the robot.
There are usually mounts on the chassis built specifically for holding the bumpers. Some can be integrated with the body and others are separate.
Air dams are extensions on front bumpers often found on touring cars to stop excess air from going under the car preventing lift from being generated while travelling at high speeds. This is essential for those unmanned cars used for racing.
Check out our full post on unmanned car applications. For each application, we dive into what it is, how it works, and some examples if any:
Related Post: 6 Awesome Unmanned Car Robot/UGV Applications Explained
What Is An Unmanned Car Powertrain?
An unmanned car powertrain is the group of components that generate and transmit power to the drive axle/wheels. It includes the drivetrain and the propulsion system used by the robotic car.
Drive axles or drive wheels are the axles or wheels (both in most cases) that act as propulsors and generate the thrust required to propel the vehicle forward.
An unmanned electric car’s powertrain is a little different from an unmanned car run by an internal combustion engine (gas or nitro).
An unmanned car drivetrain is the group of components that transfer power from the powerplant to the drive wheels.
The drivetrain in unmanned cars run by an internal combustion engine includes the transmission/gearbox, clutch, driveshaft/propeller shaft, differential, suspension system, and also the drive wheels but NOT the unpowered rear or front wheels if any.
The transmission/gearbox controls the speed output from the powerplant and transfers it to the drive wheels. Most unmanned cars will have an automatic transmission where the gears change automatically but there are also manual transmission systems that are less common.
The clutch is a component that engages and disengages the power that is transmitted between the engine and transmission. It enables an operator to change the direction the wheels rotate and change the rotational speed of the drive wheels.
Nitro-powered remote-control (RC) cars and large gas-powered unmanned cars can be equipped with one.
The driveshaft/propeller shaft is a shaft that transfers the torque and power generated by the engine from one place to another. They can be long and short (short are called half-shafts).
If an unmanned car with an engine placed on the front of the car needs to transfer that power to the drive wheels located at the rear, then a driveshaft can be used to extend to the rear differential. The same goes for engines placed at the rear with the drive wheels being at the front.
Two half-shafts can also make up a single axle if used to connect the differential or transmission to the drive wheels in the rear of the vehicle.
The differential is part of the front/rear axle assembly that transfers rotational engine power from the driveshaft to the wheels and enables each wheel on the axle to spin at different speeds.
This is essential when the car turns as one wheel can spin faster than the other to aid the turning wheels in the turn.
The suspension system separates the wheels from the body while ensuring that the wheels function as intended while providing additional stability and comfort.
It is made up of control arms, springs, dampers/shock absorbers, struts, wheels with tires, additional linkages, and sometimes an anti-sway bar.
The main types of suspension systems include dependent (if one wheel is altered, the other wheel on the same axle with be affected), independent (both wheels are separate and have no effect on each other) and semi-independent (one wheel is independent to the other but they still have an effect on each other) suspension.
In small scale remote-controlled (RC) cars, ball cups are often used.
Ball cups are hollow plastic pieces that snap onto a ball end and provide a pivot point, usually for suspension movement. Using a ball cup/ball end assembly instead of a rigid system allows the car to absorb damage sustained in a crash, so the ball cup will pop off instead of break. Ball cups are usually paired with turnbuckles for the best ease of use and assembly.
The drivetrain in unmanned electric cars includes the transmission/gearbox, propeller shaft/driveshaft (only for rear-wheel drive), differential system, suspension system, and also the drive wheels.
There are different types of drivetrains such as direct drive, gear-reduction transmissions, belt drive, shaft drive. For more information on RC car drivetrains specifically, click here.
The propulsion system is not part of the drivetrain but is included in the powertrain. This is the system that powers and propels the vehicle and is typically made up of a power source/powerplant and propulsors.
Power sources/powerplants include engines, batteries, fuel cells (FCs), solar cells, powered tethers among others. Propulsors are typically the drive wheels and sometimes tracks.
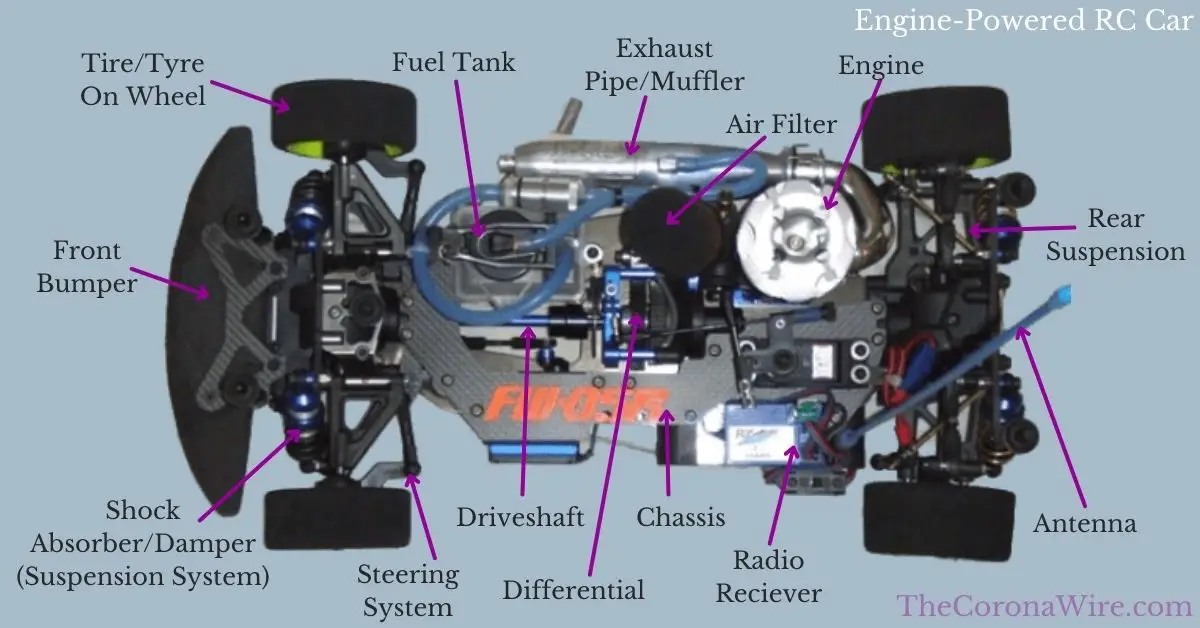
Air filters are parts of engine-powered unmanned cars that prevent dust and other particles from getting into the engine. They are essential to ensure the most efficient operation and highest output from the engine.
Carburetors are devices used with internal combustion engines that control the ratio of fuel and air that enters the engine by mixing them to the appropriate ratio depending on the needs of the engine.
An unmanned car’s engine can be placed at different parts of the vehicle but is usually placed at the front under the hood for easy access. It can however also be placed at the rear.
Some often large unmanned cars powered by internal combustion engines can incorporate grilles placed at the front of the car by the bumper to allow air to flow to the radiator and cool it.
Unmanned cars powered by internal combustion engines (both gasoline/petrol and nitro) require fuel tanks to supply the fuel and exhaust pipes/mufflers to get rid of dangerous gases.
Many of these engine-powered unmanned cars may also incorporate small batteries that can power other electronic equipment within the drone.
Most unmanned cars no matter the control method used will incorporate a kill switch on either the transmitter and/or within the vehicle to kill the power.
The wheels of an unmanned car can be powered or unpowered depending on whether they are four-wheel drive or just two-wheel drive (they are rarely more than this). Powered wheels (called drive wheels) are considered part of the powertrain but unpowered wheels are not.
There are made up of a rim, hub, spokes, and tires.
Unpowered wheels spin on bushings or bearings connected to unpowered axles. Bearings are hollow metal donuts that use balls inside to increase the efficiency of a rotating shaft (like an axle).
Axles are either fixed or spinning rods that pass through the centre of wheels. Powered axles that spin the wheels are called drive axles and power the drive wheels.
Tire tread consists of the patterns found on the surface of each tire. They can be designed differently depending on how the vehicle will be used.
For example, off-road vehicles will have a knob pattern to dig into the dirt/mud for traction whereas an on-road car may have a smoother pattern with minimal air space between the rubber and ground.
What Is An Unmanned Car Steering System?
An unmanned car steering system is the system used to change the direction the vehicle is travelling. This is achieved using a servomotor along with various gears and linkages.
An actuator is placed at the steering mechanism which is powered by the servomotor.
Common types of steering mechanisms include rack-and-pinion, Ackermann steering, and Bell-crank steering with rack-and-pinion being the most common.
This sometimes includes a steering wheel if the unmanned car is meant to be used as a hybrid manned/unmanned device. If the vehicle is used with a driver controlling the vehicle onboard, it will no longer be considered a drone/unmanned ground vehicle (UGV) but will still be considered a robot.
The caster angle is the alignment/angle of the suspension components in relation to the centre of the turning wheels. A zero/neutral caster angle would mean that the suspension spring/shock is perfectly vertical in relation to the centre of the wheel.
Positive caster would mean that the suspension spring/shock is angled forwards towards the front of the vehicle and negative caster would therefore mean it would be angled to the rear.
A positive caster angle provides better handling, stability and more control over the vehicle.
What Is An Unmanned Car Communications System?
An unmanned car communications system is the system enabling a car to send and receive data to and from the operator. It includes a radio transmitter (Tx) and receiver (Tx), each with its own antenna.
In remote-controlled (RC) unmanned cars, the inputs made from the transmitter are transmitted via radio waves over to the receiver found in the robot which then acts on this data and makes the necessary adjustments.
In autonomous unmanned cars, the human operator (if any) will use this data to monitor the activities of the robot and potentially intervene if necessary.
Radio transmitters typically have two channels, one for steering and the other for throttle control and braking. They can have on-screen displays and can provide multispeed transmission capabilities.
There are two types of handheld controllers (transmitters). One being the pistol grip transmitter (gripped in one hand typically with trigger for throttle control and wheel on the side for steering) and the other being the stick transmitter (typically two thumb/joysticks and several other buttons for additional features).
Larger unmanned cars can also have larger bundles of computers, antennas, and displays which require multiple operators in the form of a ground control station (GCS). A control station that can move around is called a mobile control station (MCS).
This is also where a generator can be placed which supplies power to not only the station itself but also a powered tether if the drone uses one.
What Is An Unmanned Car Braking System?
An unmanned car braking system is the system that enables a car to brake. This can be achieved using brake discs (mechanical brakes) or an electronic speed controller (ESC) that locks or reverses the motor’s current (electric brakes).

Brake discs are mechanical devices used in disc brake assemblies that use friction to slow down or prevent an unmanned car from moving. They are made up of callipers that store and squeeze several brake pads against brake discs/rotors to create this friction.
An electronic speed controller (ESC) is a component used in drones to control and change the speed of their electric motors. They contain microcontrollers and sometimes integrated power distribution boards (PDBs).
A power distribution board (PDB) is a component that can either be built into each ESC or is separately placed in between the power source (typically a battery) and the ESC and distributes the right amount of power to each ESC.
These PDBs typically have integrated battery eliminator circuits (BECs) to regulate the amount of voltage being distributed to each ESC.
Each motor will typically require its own ESC. However, recent innovations have brought the 4 in 1 ESC which is a circuit board that does the job of 4 separate ESCs in one place making it more compact and lightweight.
The ESC also needs to be connected to the receiver or the autonomous system so that the inputs from the operator (human or computer) can be implemented.
Braking will go into effect when the operator reverses the throttle on the controller (transmitter).
Autonomous vehicles use the autonomous emergency braking (AEB) system that enables them to achieve the same task but using the data measured by the sensors on-board to determine when to brake to avoid a collision.
What Is An Unmanned Car Automation System?
An unmanned car automation system is the group of components that enable an unmanned car to function either semi-autonomously (little human intervention) or fully autonomously (no human intervention) using a group of components that all work together.
This can be achieved using various sensors, complex computer programs, and actuators.
Some may also have a form of artificial intelligence (AI) incorporated within the software giving the vehicle machine learning capabilities where it can learn and adapt to its environment and make decisions based on the data it gathers.
Common sensors include perception sensors such as radar, camera, lidar, infrared, and ultrasonic sensors, and guidance and navigation sensors such as inertial navigation systems (INS), odometry, steering systems, and GPS/GNSS sensors.
Radar (radio detection and ranging) calculates the angles, ranges, and velocities of long-range objects using radio frequency (RF) waves.
Camera sensors can provide the software with visual images for the computer to interpret.
Lidar (light detection and ranging) uses lasers that reflect off of objects and measures the time it takes for that reflected laser to return to detect and/or determine the distance of an object from the vehicle.
Infrared sensors detect various objects including pedestrians using the infrared spectrum.
Ultrasonic sensors use ultrasonic waves to measure the distance of objects at a short range from the vehicle. They’re often found in the wheels of the car to detect curbs and such objects when parking.
An inertial navigation system (INS) is an electronic device comprising of several sensors such as an inertial measurement unit (IMU), barometers, and sometimes magnometers which measures and reports a drone’s specific force, angular velocity and direction, body orientation, altitude, and sometimes magnetic field.
The IMU is a smaller component within an INS containing accelerometers and gyroscopes which contribute to gathering data such as the acceleration and the orientation of a ground robot.
They work together with GNSS (Global Navigation Satellite System) sensors that synchronise with these types of artificial satellites to determine the exact location of a drone.
If the GNSS sensor fails, the data being gathered by the IMU can take over as the primary navigation system.
Odometry sensors are also used and placed at the wheels of the robot to estimate the change in position over certain periods of time.
Sophisticated software incorporated with these systems will then process much of this data and will plan the best course of action based on its predictions and send instructions over to the car’s actuators for them to act.
What Are Unmanned Car Payloads?
The payload is the additional weight an unmanned car can carry and transport other than its base weight. This often includes passengers and freight and excludes things such as fuel that is essential for it to function.
Other things such as cameras and other sensors can also be considered payloads.
A common misconception is that unmanned vehicles cannot have anyone on board the robot for it to be considered a drone. In reality, there just can’t be any crew members operating the vehicle in the ground drone.
Conclusion
We hope you’ve learned something new and/or understood a part or component that you have been trying to understand.
We grouped up some of these parts/components into some of the main functions as there are just so many to cover which can be overwhelming to see at first.
We highly recommend you check out our main article on what unmanned cars are and how they work to learn more about these incredible machines.