Rotary-wing unmanned aerial vehicles (UAVs) are sophisticated robots made up of several parts and components.
This article is meant for those wishing to learn out of curiosity, or those wishing to build one of their very own rotary-wing UAVs.
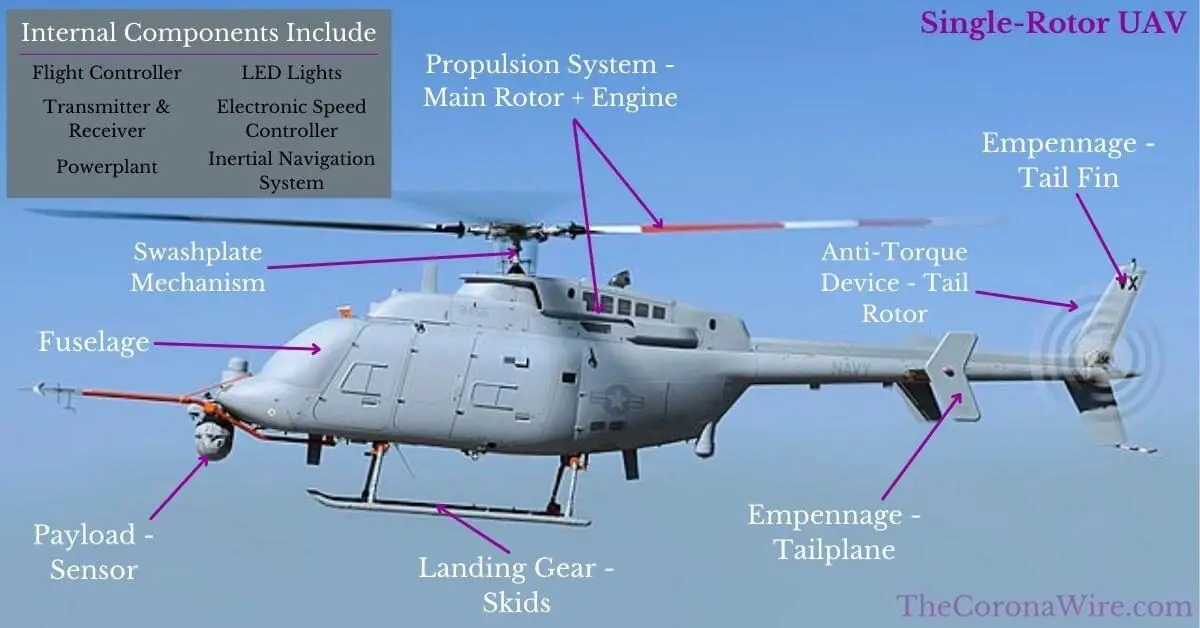
Here are the main rotary-wing drone/UAV parts & components:
- Fuselage
- Airframe
- Swashplate mechanism
- Tail assembly/empennage
- Landing gear/Undercarriage
- Propulsion system
- Payload
- Transmitter & Receiver
- Flight controller (FC)
- Electronic speed controller (ESC)
- Battery eliminator circuit (BEC)
- Inertial navigation system (INS)
Take note that not all of these parts & components are going to be found in every type of rotary-wing UAV. We will specify when needed.
- What Is A Rotary-Wing UAV Fuselage?
- What Is A Rotary-Wing UAV Airframe?
- What Is A Rotary-Wing UAV Swashplate Mechanism?
- What Is A Rotary-Wing UAV Tail Assembly/Empennage?
- What Is Rotary-Wing UAV Landing Gear/Undercarriage?
- What Is A Rotary-Wing UAV Propulsion System?
- What Is Rotary-Wing UAV Payload?
- What Are Rotary-Wing UAV Transmitters & Receivers?
- What Is A Rotary-Wing UAV Flight Controller (FC)?
- What Is A Rotary-Wing UAV Electronic Speed Controller (ESC)?
- What Is A Rotary-Wing UAV Battery Eliminator Circuit (BEC)?
- What Is A Rotary-Wing UAV Inertial Navigation System (INS)?
- Additional Rotary-Wing UAV Parts & Components
- Conclusion
What Is A Rotary-Wing UAV Fuselage?
A rotary-wing drone/UAV fuselage is the main body of a rotary-wing drone. It typically supports the UAV’s tail assembly and undercarriage along with payloads.
It contains various payloads including passengers, freight and important internal components stored within it or attached to its exterior.
The fuselage is designed in a way that produces the least amount of drag while having a large enough payload capacity that does not impact the drone’s lift/drag ratio, stability and control.
Check out our full post on what rotary-wing drones/UAVs are where we dive into how they work, applications, parts/components, advantages/disadvantages, common powerplants and examples:
Related Post: What Are Rotary-Wing UAVs? Unmanned Rotorcraft Explained
The MQ-8B Fire Scout made by Northrop Grumman which is a single-rotor unmanned helicopter and the Anafi USA made by Parrot which is a multi-rotor quadcopter are two examples of rotary-wing UAVs with different fuselages.
What Is A Rotary-Wing UAV Airframe?
A rotary-wing drone/UAV airframe is the structural part of a rotary-wing UAV that reinforces and holds together the fuselage, landing gear and tail assembly but not the propulsion system.
Single-rotor and twin-rotor rotary-wing UAVs typically have the same airframe shape that resembles a cylindrical shape with a tail.
Multi-rotor UAVs often have a flatter and circular (octocopter/hexacopter) or square (quadcopter) shape created by their fuselage and multiple arms extending outwards each with their own propellers.
Check out our full post on the types of rotary-wing UAVs where we dive into what each type is and how they work along with some examples of each:
Related Post: What Are The Types Of Rotary-Wing Drones/UAVs? (+Pictures)
What Is A Rotary-Wing UAV Swashplate Mechanism?
Single and twin-rotor drones/UAVs typically require swashplate mechanisms located at the rotor shaft consisting of a bottom and top independent swashplate (bottom is stationary and top moves with rotor) while being attached together via a bearing.
The top swashplate is attached to the rotor shaft via a driver and is also attached to the blades using control rods.
Swashplate mechanisms are required for each main rotor used in the UAV. Many different types of twin-rotor UAVs are going to require two swashplate mechanisms.
The swashplate mechanism is what allows the main rotors to pivot therefore allowing the drone to move in several directions.
Multi-rotor UAVs typically don’t require these complex systems, instead just attaching propellers to a motor’s stator (the rod that spins in a motor) which is advantageous to reduce complexity and the chance of a malfunction.
Check out our full post on rotary-wing advantages and disadvantages where we explain several benefits and drawbacks to these types of UAVs:
Related Post: 11 Rotary-Wing Drone/UAV Advantages+Disadvantages Explained
Take note that single and twin-rotor rotary-wing UAVs often have a bar located atop the main rotors called balance bars to aid in stability.
What Is A Rotary-Wing UAV Tail Assembly/Empennage?
A rotary-wing drone/UAV tail assembly/empennage is the entire tail configuration which includes a fin (vertical stabiliser) that acts vertically and sometimes a horizontal tailplane/stabiliser that acts horizontally and an anti-torque device.
Take note that multi-rotor UAVs typically do not have empennages along with some types of twin-rotor UAVs.
Single-rotor UAVs require an anti-torque device which is also found on the empennage to control the aircraft’s yaw. Anti-torque devices include tail rotors, ducted fans, and NOTAR/no tail rotor (includes tip jet helicopters).
Check out our full article where we dive into what single-rotor UAVs are along with how they work, the types, differences between all rotorcraft, applications, benefits/drawbacks and examples:
Related Post: What Are Single-Rotor Drones? Unmanned Helicopters Explained
Twin-rotor and multi-rotor UAVs do not require anti-torque devices as they use contra-rotating rotors to cancel torque generated by these main props but are far more complex and therefore more prone to malfunctions and high maintenance costs.
Contra-rotation is when two propellers rotate in opposite directions, therefore cancelling out the torque each propeller generates and eliminating the need for an anti-torque device.
A tailplane/horizontal stabiliser is often found on the tails of rotary-wing UAVs to aid in control and stability.
What Is Rotary-Wing UAV Landing Gear/Undercarriage?
Rotary-wing drone/UAV landing gear/undercarriage is the part of a drone that supports the entire aircraft for takeoff, landing and while it is parked.
Types include floats or skis for water/ice-based operations and typically skids for land-based operations.
What Is A Rotary-Wing UAV Propulsion System?
A rotary-wing drone/UAV propulsion system is the entire system that propels the drone and provides it with power enabling it to takeoff, land and hover.
It includes engines, batteries, fuel cells (FCs), drone tethers, solar power, propellers, motors among others.
Check out our full post where we dive into several powerplants and propulsion devices currently used in drones. For each power source, we expand on how they work, the different types, the advantages, disadvantages, and real-world examples of drones that use it.
Related Post: How Are Drones Powered? 6 Drone Energy Sources Explained
What Is Rotary-Wing UAV Payload?
Rotary-wing drone/UAV payload includes any additional weight a UAV can carry that is not essential for it to function other than its base weight.
The payload includes all sorts of cargo such as baggage, passengers and additional equipment and excludes things like fuel or other power sources that are needed by the drone to function.
Common examples of rotary-wing payloads include electro-optical/infrared (EO/IR) sensors, LIDAR (light detection and ranging), radar, gimbals, thermal imagers etc.
Check out our post where we dive into what a drone gimbal is, what kinds of drone gimbals are available, whether drones need gimbals, how a drone gimbal works, how to choose the right gimbal, how much they cost and much more:
Related Post: What Is A Drone Gimbal? Does Your Drone Need One? [Types, How They Work, Prices And How To Choose One]
These types of payloads are typically used for all types of drones, not just for the rotary-wing configuration.
A common misconception is that unmanned aerial vehicles cannot have anyone on board the robot for it to be considered a drone. In reality, there just can’t be any crew members operating the vehicle in the aircraft, but there can be passengers.
What Are Rotary-Wing UAV Transmitters & Receivers?
Rotary-wing drone/UAV radio transmitters (Tx) and receivers (Rx) are components found in drone systems that enable the operator to control the UAV, send and receive data from the UAV using electromagnetic waves.
These components are typically used for all types of drones, not just for the rotary-wing design.
A radio transmitter and receiver used in the same telecommunications unit is called a transceiver.
The drone operator controls the drone with their transmitter (controller) that generates and transmits electromagnetic waves over to the receiver found on the UAV which sends that data to the flight controller for it to act.
This enables the operator to increase the speed or change the direction the drone is flying.
Some systems can have the drone send back some data as radio waves to the operator’s controller which converts those radio waves into visible signals for them to read on the controller’s interface. Both also have antennas used to transmit this data.
More sophisticated UAVs typically require large equipment called ground control stations (GCS) or mobile control stations (MCS) depending on whether they are mobile during operation which extends the capabilities of a hand-held controller.
These larger systems often require multiple operators that each control and monitor the UAV.
These large controllers can drastically increase the range of a UAV along with a better receiver module in the drone which is very beneficial to long-range rotary-wing drones depending on the power output and the quality of the antennas used for the data exchanges.
They can also keep track of, control, and measure data sent from a complex UAV.
What Is A Rotary-Wing UAV Flight Controller (FC)?
A rotary-wing drone/UAV flight controller (FC) is the brain of a drone. It’s a circuit board equipped with varying numbers of sensors and equipment in the drone that processes the information gathered by these sensors and controls things such as the speed of the aircraft and the data it measures.
These components are typically used for all types of drones, not just for the rotary-wing design.
Wires, ports, electronic speed controllers (ESCs), power distribution boards (PDBs), motors, inertial measurement units (IMUs), barometers, and many additional components are all connected to and controlled by the FC as long as it can support these devices.
Take note that different flight controllers (FCs) can support different numbers and types of ports.
They can come with additional features such as a built-in compass, current sensors to measure current, an autopilot module, or these devices may need to be purchased separately.
What Is A Rotary-Wing UAV Electronic Speed Controller (ESC)?
A rotary-wing drone/UAV electronic speed controller (ESC) is a device used in drones to control and change the speed of their electric motors. They contain microcontrollers and sometimes integrated power distribution boards (PDBs).
These components are typically used for all types of drones, not just for the rotary-wing design.
The ESCs microcontroller houses a program or firmware which controls the motors.
A power distribution board (PDB) is a component that can either be built into each ESC or is separately placed in between the power source (battery, fuel cell etc.) and the ESC and distributes the right amount of power to each ESC.
These PDBs typically have integrated BECs (more on this in the next heading) to regulate the amount of voltage being distributed to each ESC.
Typically, each motor requires its own ESC. However, more recent innovations have brought the 4 in 1 ESC which is a circuit board that does the job of 4 separate ESCs in one place making it more compact and lightweight.
ESCs also need to be connected to the receiver so that the inputs from the operator on the ground can be implemented in the drone.
What Is A Rotary-Wing UAV Battery Eliminator Circuit (BEC)?
A rotary-wing drone/UAV battery eliminator circuit (BEC) is a voltage regulator used to properly distribute the right amount of power (DC voltage) to any electric component that needs power which eliminates the need for multiple batteries.
These components are typically used for all types of drones, not just for the rotary-wing design.
These devices are used to regulate the DC voltage from the battery and to distribute the required voltage to each component such as the flight controller, payloads, IMU, etc. Different components may require different amounts of power.
The difference between power distribution boards (PDBs) and battery eliminator circuits (BECs) is that PDBs split up the power from the battery specifically to the ESC and still need built-in BECs within them to regulate voltages whereas BECs both distribute and regulate the voltage sent from the battery for each component in a drone that requires power.
BECs can either come separate or can be integrated into the component intended to be powered within the robot.
Check out our post where we explain whether a drone is a robot, what a drone and a robot are, some types of robots, the difference between the two, and some examples of each:
Related Post: Is A Drone Considered A Robot? Everything You Need To Know
What Is A Rotary-Wing UAV Inertial Navigation System (INS)?
A rotary-wing drone/UAV inertial navigation system (INS) is an electronic device comprising of several sensors such as an inertial measurement unit (IMU), barometers, and sometimes magnometers which measures and reports a drone’s specific force, angular velocity and direction, fuselage orientation, altitude, and sometimes magnetic field.
These components are typically used for all types of drones, not just for the rotary-wing design.
The inertial navigation system (INS) is a type of guidance system and is an essential component that enables a drone to have autopilot capabilities.
The inertial measurement unit (IMU) is a smaller component within an INS containing accelerometers and gyroscopes which contribute to gathering data such as the acceleration and the orientation of a drone.
They work together with GNSS (Global Navigation Satellite System) sensors that synchronise with these types of artificial satellites to determine the exact location of a drone.
They also work together with barometers which measure air pressure to in turn determine the drone’s altitude.
If the GNSS sensor fails, the data being gathered by the IMU can take over as the primary navigation system.
Additional Rotary-Wing UAV Parts & Components
Here are additional rotary-wing drone/UAV parts and components that may not be essential for the drone to function but are still commonly used:
- Servos: device used to control aerodynamic devices such as rudders, flaps, ailerons etc; controlled by receiver and ESC
- LED lights: includes navigation lights and anti-collission lights to aid in keeping track of a drone during flight
- Obstacle avoidance sensors: used to avoid obstacles before the drone impacts with them. There are downwards facing sensors and forward facing sensors
- Kill switch: safety mechanism connected to the flight controller and receiver that shuts off the power to the drone when instructed by the operator in an emergency
Conclusion
These are the primary parts and components typically found in most rotary-wing UAVs. We specified the components that are typically used in all types of drones.
These robots are quite complex and are capable of achieving some incredible things. We hope you learned something new and make sure you check out our full article on what rotary-wing UAVs are to learn more.