
Image 1 Source; Image 2 Source; Image 3 Source; Image 4 Source
Unmanned buses, commonly referred to as robotic buses or bus unmanned ground vehicles (UGVs), are becoming more and more popular in the unmanned systems industry as the technology allowing them to operate fully autonomously improves.
Remote-controlled buses are not as popular as the new up and coming fully-autonomous unmanned buses that are now beginning to be designed and tested by various companies across the world in hopes that they could revolutionise the transportation industry.
Unmanned buses, also called robotic buses, are types of powered drones/unmanned ground vehicles (UGVs) that are designed to transport a much larger number of people compared to an average van or car (typically between 15 to 60 passengers).
Robotic buses range in size from small toy-grade buses you can pick up to large scale buses that are the size of real manned vehicles used to transport people.
Take note that unmanned buses include remote-control (RC)/teleoperated, autonomous/self-driving, and artificially intelligent unmanned buses.
These types of unmanned vehicles fall under the broad category of unmanned motor vehicles. Unmanned motor vehicles are sub-types of unmanned ground vehicles (UGVs).
How Do Unmanned Buses Work?
Unmanned bus drones/robots propel themselves using a power source and several spinning wheels along with a suspension, steering, braking and a communications system enabling them to be controlled remotely and/or to be semi to fully autonomous.
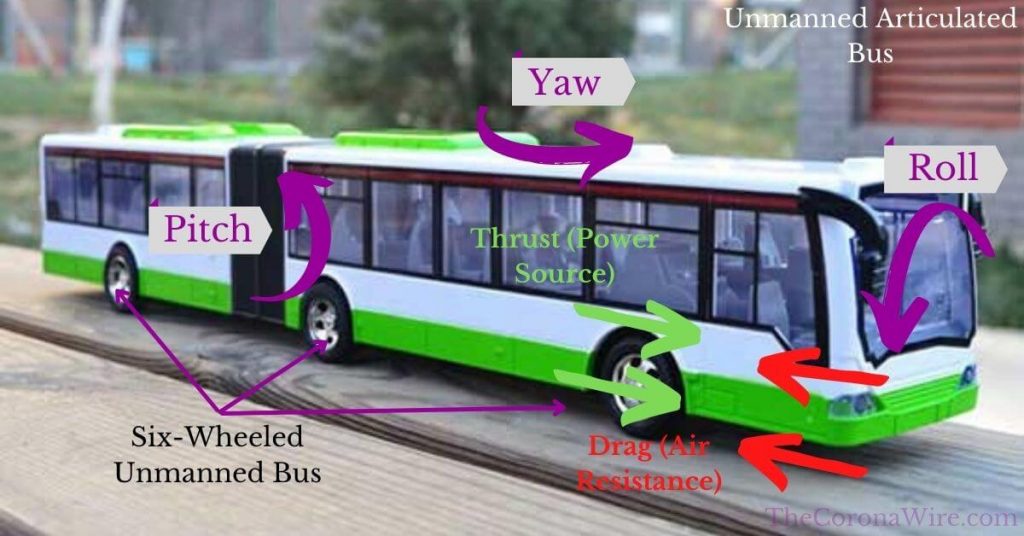
Bus UGVs experience several forces including thrust generated by a power source that opposes drag caused by air resistance and friction generated by the moving mechanical parts such as spinning wheels against the axles.
They incorporate various parts and components that work together to enable the vehicle to drive such as a chassis, wheels, power sources, suspension systems etc. (more on this below).
Pitch, roll, and yaw are each present in moving robotic buses and can be controlled to a degree by the suspension system.
Pitch is the change in angle of an unmanned bus along its transverse axis forwards and backwards. When the front of the bus goes up, the back goes down and vice versa.
Roll, also called body roll, is the change in angle of the body of an unmanned bus along its longitudinal axis. If a person stood at one side of the bus (passenger or driver’s side) and lifted it somehow, that would be a roll.
Yaw is the change in angle of an unmanned bus along its vertical axis. When the bus turns, it changes direction either going left or right. This is called yaw and is different from roll as all the wheels stay on the ground.
Understanding the pitch, roll, and yaw of individual unmanned buses is important as each of them slightly changes the bus’ centre of gravity causing a weight transfer which if not properly configured could cause the bus to easily flip over or slide out during a turn.
This is worsened for unmanned buses that have extra weight higher from the ground, especially if they are also fairly thin (small width).
For example, unmanned double-decker buses are going to need to worry a lot more about controlling their speed in a turn as they have a lot more weight at an elevated height compared to traditional single-decker buses.
Unmanned buses in most cases will not be built for speed, instead focusing more on being made for maximum payload capacity, efficiency, while still maintaining comfort for the passengers or stability for other cargo.
They also need power sources which are devices used to generate and provide power to the other components in the robot. Power sources include many devices such as a powered tether, engines, batteries, fuel cells, solar cells etc.
Check out our full post where we dive into several powerplants and propulsion devices used in drones. For each power source, we expand on how they work, the types, advantages/disadvantages, and examples of drones using it:
Related Post: How Are Drones Powered? 6 Drone Energy Sources Explained
Some can be electrically powered (electric buses), some can be gas/petrol powered (engine-powered buses), and some can also be hybrids incorporating both types of propulsion systems.
This is referring to the main source of power as many unmanned buses with engines also have small batteries for example used to power other less critical internal components.
The braking systems used by unmanned buses differ depending on whether they’re electric or mechanical.
In electric brakes, the electronic speed controller (ESC) controls this by locking the current flowing from the motors.
In mechanical brakes, brake disks attached to brake pads held together to the wheel by brake callipers apply resistance to the differential system and slow down the robotic bus.
There are two-wheel drive, four-wheel drive (most common), eight-wheel drive (rare), and all-wheel drive unmanned buses. This refers to which pair of wheels on a drive axle is powered in a bus.
They often require much larger wheels on each axle as the payload they carry is in almost every case much higher than smaller unmanned ground vehicles (UGVs) such as unmanned cars.
Check out our full post on what unmanned cars are where we dive further into how they work, their applications, parts/components, advantages/disadvantages, propulsion systems they use and examples:
Related Post: What Are Unmanned Cars? Drone/UGV Automobiles Explained
The camber angle refers to the angle of the wheels when viewed from the front or back of the vehicle in relation to the ground. Almost every unmanned bus has a neutral/zero camber where the wheels are perpendicular to the ground.
Positive camber is where the top of the wheels lean out away from the chassis. Negative camber is where the top of the wheels lean in towards each other. The camber angle for each pair of tires on each axle should be the same.
Unmanned buses can be controlled remotely often using radio waves (RC buses), controlled using pre-programmed software (semi-autonomous buses), or controlled using pre-programmed software and typically machine learning where the drone will learn based on data gathered and make its own decisions (fully autonomous/self-driving buses).
RC buses are often modelled after real buses at a smaller scale in many cases. These scales include 1/8 all the way to 1/17 and can be even less or more than this range.
It’s important to understand that both teleoperated/remote control and autonomous buses can be built both smaller and larger than real manned buses.
What Are The Types Of Unmanned Buses?
The types of unmanned buses can be split up according to:
- The general types
- The chassis types
- The body design/configuration
- The control system
The general types of unmanned buses include unmanned transit/city buses, minibuses, midibuses, shuttle buses, school buses, motor coaches, and off-road buses.
The chassis types include rigid buses and bendy-buses (flexible buses).
The body designs/configurations include unmanned single-decker buses, double-decker buses, articulated buses, open-top buses, low-floor buses, and step-entrance buses.
The types of unmanned buses according to the control system used include remote-controlled (RC)/teleoperated, semi-autonomous, fully autonomous, and hybrid control system buses.
What Are Unmanned Buses Used For?
Here are 5 applications for unmanned buses:
- Transporting people within a city
- Bus chartering
- Transporting people from one city to another (inter-city)
- Transporting people in rough terrain such as mud or snow
- Sight-seeing for tourists
What Parts/Components Make Up Unmanned Buses?
The safety of the passenger aboard unmanned passenger buses is the most important factor to take into account. The parts and components that make up these unmanned vehicles ensure that they are efficient and safe while operating on the road.
Here are 7 main parts & components that make up unmanned buses:
- Structural system
- Body/shell
- Powertrain
- Steering system
- Communications system
- Braking system
- Automation system
The structural system is the strongest part of the UGV that supports all other components and payloads within the robot in order for it to function.
This can refer to the drone’s frame or chassis, or the combination of the frame with other components that enable the vehicle to move including the transmission, engine, steering etc which is then called a rolling chassis which simply requires a body/shell to be completed.
The two types of bus chassis include rigid chassis (most buses) and flexible chassis (articulated bus).
The body/shell is the part of an unmanned bus that typically covers the chassis/frame protecting the internal components. It can come separate from the chassis/frame or come permanently attached to it (unibody chassis).
The body can be designed to replicate the design of almost any type of manned bus.
The powertrain is the group of components that generate and transmit power to the drive axle/wheels. It includes the drivetrain and the propulsion system used by the robotic bus.
The steering system is the system that enables the entire robot to change direction according to the desired course of the drone and/or operator.
The communications system is the system enabling the operator to send and receive data to and from the unmanned bus. This can be used to monitor the sensors on the vehicle over long distances and/or to control the drone.
A radio transmitter and receiver are typically used to achieve this along with all other parts and components enabling the vehicle to be controlled.
The braking system is the system that enables a bus to brake. This can be achieved using brake discs (mechanical brakes) or an electronic speed controller (ESC) that locks or reverses the motor’s current (electric brakes).
The automation system is the group of components that enable an unmanned bus to function either semi-autonomously (little human intervention) or fully autonomously (no human intervention) using a group of components that all work together such as sensors and complex computer programs.
What Are The Advantages & Disadvantages Of Unmanned Buses?
We’ve decided to split up the advantages and disadvantages of unmanned buses into separate sections.
Unmanned bus robot advantages
Here are 4 advantages of unmanned buses:
- They can transport large numbers of people and/or cargo at a time
- They can be made to be very versatile
- They’re much safer than many other means of land transport
- They’re easy to set up and operate (RC buses specifically)
Unmanned bus robot disadvantages
Here are 4 disadvantages of unmanned buses:
- They’re much slower than other means of road transport such as unmanned cars
- They typically cost more to own and operate than other means of road transport
- They’re often noisy and may be uncomfortable for passengers
- They may struggle in cities with many steep inclines causing overheating issues (especially articulated buses which weigh more)
What Are Some Examples Of Unmanned Buses?
Remote-controlled (RC) buses have been around for a while now, but semi-autonomous buses are still fairly new and fully autonomous vehicles are not yet truly operational due to restrictions in both the technology and the laws set by governments.
Some of these examples will include prototypes of autonomous buses that have not yet been released or are just in the trial phases. For buses that are meant to be fully autonomous, we will consider them fully/semi-autonomous vehicles.
Here are 6 examples of unmanned buses:
| Name | Manufacturer | Body Configuration/Type | Control Method |
| Remote-Control Bus City Express | Moerc | Single-Decker Transit/City Bus | Remote-Controlled (RC) |
| Driverless Electric Bus (Not Official Name) | Irizar Group | Single-Decker Transit/City Bus | Fully/Semi-Autonomous |
| Autonom® Shuttle Evo | Navya Technology | Single-Decker Shuttle Bus | Fully/Semi-Autonomous |
| E640-003 1/18 RC Double-Decker Bus | Unbranded | Double-Decker Tour Bus | Remote-Controlled (RC) |
| Xiaoyu 2.0 | Yutong | Single-Decker Shuttle Bus | Fully/Semi-Autonomous |
| Olli | Local Motors | Single-Decker Shuttle Bus | Fully/Semi-Autonomous |
If you’d like to discover who the best drone companies are in the world for the consumer, commercial and military drone markets and some fun facts about them, we have a full post on this topic below:
Related Post: Top Drone Companies/Manufacturers In The World [History, What They Offer, Popular Drones And More]
Conclusion
These types of unmanned vehicles (specifically fully autonomous buses) are on the rise and could potentially revolutionise public transportation.
We hope you’ve learned something new and that your understanding of unmanned buses has expanded.